
程序如下
void PWM_Init()
{
GPIO_InitTypeDef GPIO_InitStructure={0};
TIM_OCInitTypeDef TIM_OCInitStructure={0};
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_Init( GPIOA, &GPIO_InitStructure );
TIM_TimeBaseInitStructure.TIM_Period = 10000;
TIM_TimeBaseInitStructure.TIM_Prescaler = 0;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned1;
TIM_TimeBaseInit( TIM1, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 3000;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init( TIM1, &TIM_OCInitStructure );
TIM_OC2Init( TIM1, &TIM_OCInitStructure );
TIM_OC3Init( TIM1, &TIM_OCInitStructure );
TIM_OC4Init( TIM1, &TIM_OCInitStructure );
TIM_CtrlPWMOutputs(TIM1, ENABLE );
TIM_OC1PreloadConfig( TIM1, TIM_OCPreload_Disable );
TIM_OC2PreloadConfig( TIM1, TIM_OCPreload_Disable );
TIM_OC3PreloadConfig( TIM1, TIM_OCPreload_Disable );
TIM_OC4PreloadConfig( TIM1, TIM_OCPreload_Disable );
TIM_ARRPreloadConfig( TIM1, ENABLE );
TIM_Cmd( TIM1, ENABLE );
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init(115200);
printf("SystemClk:%d\r\n",SystemCoreClock);
printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() );
printf("This is printf example\r\n");
PWM_Init();
TIM1->CH1CVR = 2000;
TIM1->CH2CVR = 4000;
TIM1->CH3CVR = 6000;
TIM1->CH4CVR = 8000;
while(1)
{
}
}
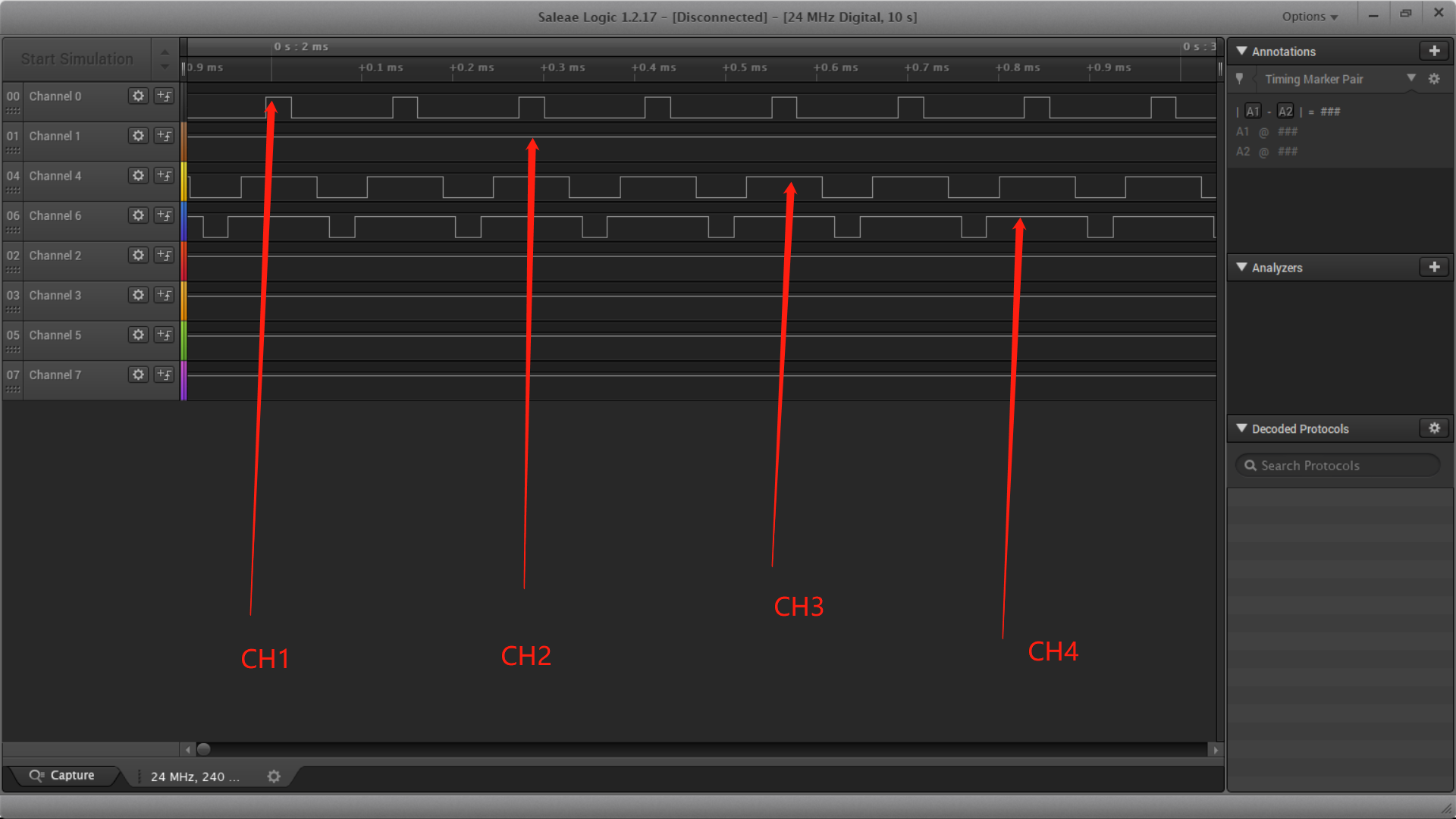
波形如图
热门产品 :
CH634: 4端口USB3.0 HUB控制器芯片
