用了个官方spi1的例子,代码如下,从分析仪可以看到clk和mosi,但是不知为什么spi_cs信号始终为低
另外自己写了一个spi2的代码,SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) != RESET 这个条件始终不能满足,不知道是为什么
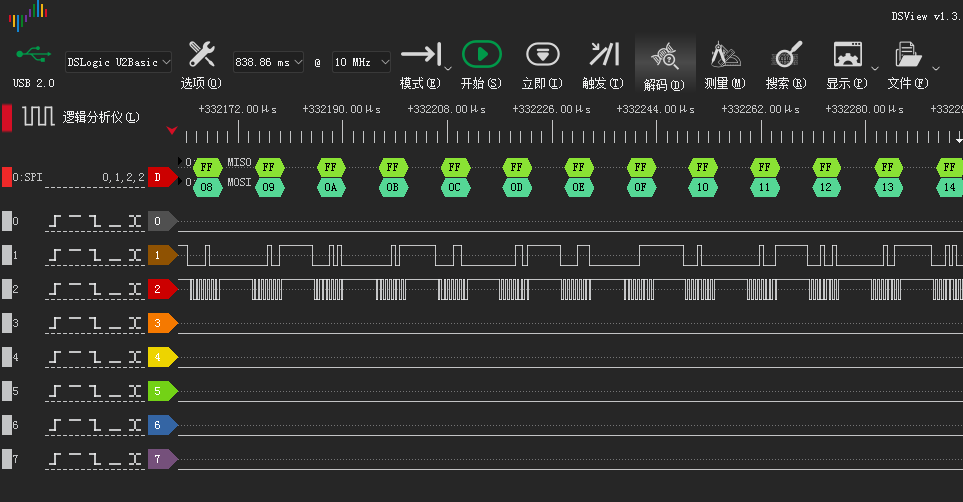
附件是spi1的时序图,cs信号始终为低
-----------------spi1的测试例程---------------------------------
void Test1()
{
u8 i;
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init(115200); //USART initialize
printf("Test1\r\n");
GPIO_InitTypeDef GPIO_InitStructure={0};
SPI_InitTypeDef SPI_InitStructure={0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_SPI1, ENABLE );
//cs
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure );
//clk
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure );
//miso
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure );
//mosi
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure );
SPI_SSOutputCmd( SPI1, ENABLE );
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure );
SPI_Cmd(SPI1, ENABLE );
i = 0;
while (1)
{
while (i<100)
{
if(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE ) != RESET )
{
Delay_Us(10);
SPI_I2S_SendData(SPI1, i);
i++;
}
}
i = 0;
}
}
-----------------spi2的测试例程---------------------------------
void Test2()
{
u8 i;
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init(115200); //USART initialize
printf("Test2\r\n");
GPIO_InitTypeDef GPIO_InitStructure={0};
SPI_InitTypeDef SPI_InitStructure={0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB1Periph_SPI2, ENABLE);
//cs
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure );
//clk
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure );
//miso
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //MISO
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure );
//mosi
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure );
SPI_SSOutputCmd(SPI2, ENABLE );
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure );
SPI_Cmd(SPI2, ENABLE );
i = 0;
while (1)
{
while (i<100)
{
printf("get2\r\n");
if(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) != RESET )
{//=========================================永远进入不了这里,条件始终不能满足
SPI_I2S_SendData(SPI2, i);
printf("send2\r\n");
i++;
}
Delay_Ms(1000);
}
i = 0;
}
}