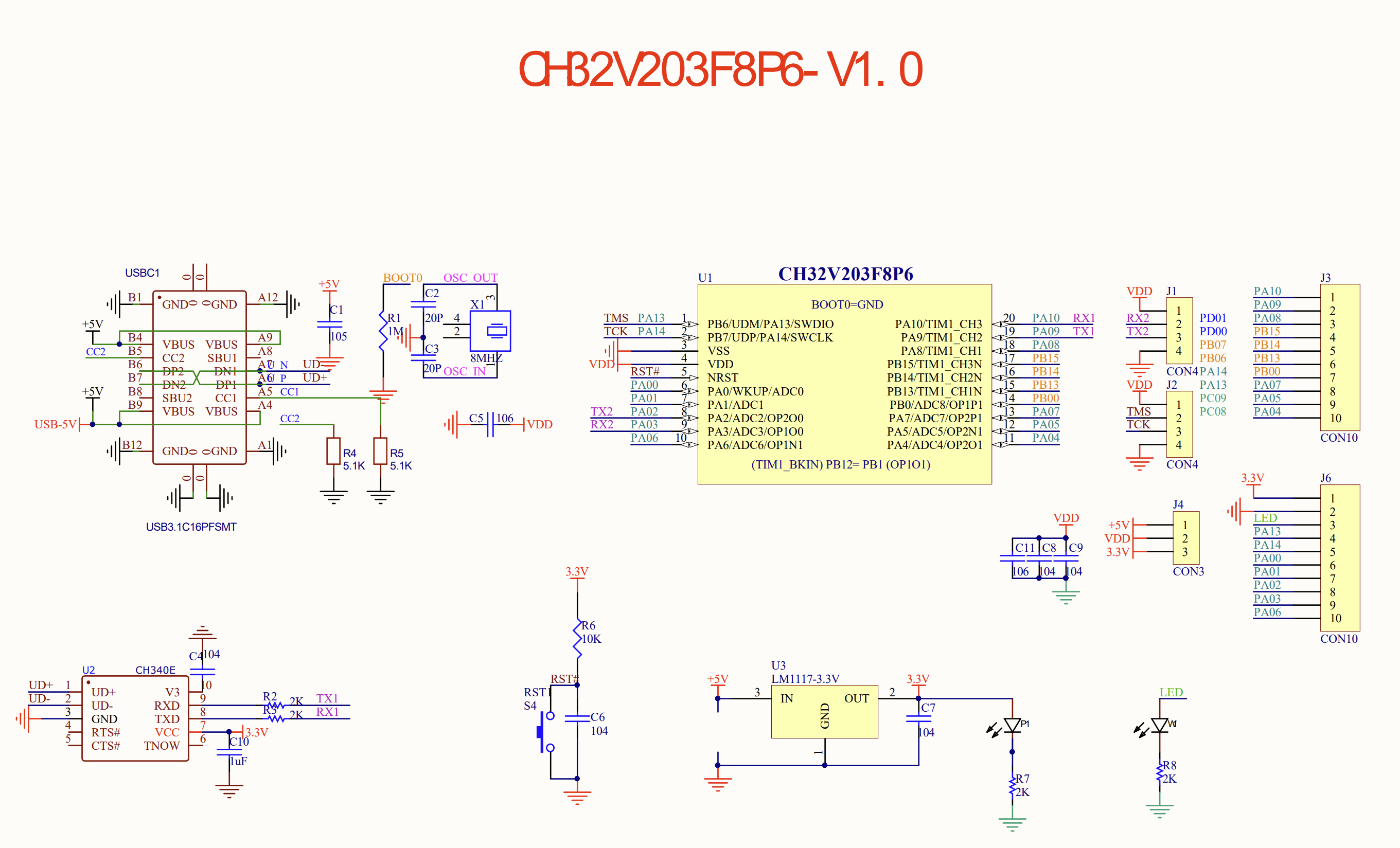
ch32v203f8p6 使用i2c时卡死在while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );。
我使用的是官方给的例程,原本i2c两个端口一个拉高一个拉低,通过看其他帖子发现需要把i2c上拉,就自己焊了电阻连到vcc上,现在空闲时是sda(pb7)大概4v,scl(pb6)大概5v。(因为我供电是5v,在板子上也把5v和vcc用跳线帽连起来了)。请问这个是什么问题?
代码如下所示:
/********************************** (C) COPYRIGHT *******************************
* File Name : main.c
* Author : WCH
* Version : V1.0.0
* Date : 2021/06/06
* Description : Main program body.
*********************************************************************************
* Copyright (c) 2021 Nanjing Qinheng Microelectronics Co., Ltd.
* Attention: This software (modified or not) and binary are used for
* microcontroller manufactured by Nanjing Qinheng Microelectronics.
*******************************************************************************/
/*
*@Note
*7-bit addressing mode, master/slave mode, transceiver routine:
*I2C1_SCL(PB8)\I2C1_SDA(PB9).
*This routine demonstrates that Master sends and Slave receives.
*Note: The two boards download the Master and Slave programs respectively,
*and power on at the same time.
* Hardware connection:PB8 -- PB8
* PB9 -- PB9
*
*/
#include "debug.h"
/* I2C Mode Definition */
#define HOST_MODE 0
#define SLAVE_MODE 1
/* I2C Communication Mode Selection */
#define I2C_MODE HOST_MODE
//#define I2C_MODE SLAVE_MODE
/* Global define */
#define Size 6
#define RXAdderss 0x02
#define TxAdderss 0x02
/* Global Variable */
u8 TxData[Size] = { 0x01, 0x02, 0x03, 0x04, 0x05, 0x06 };
u8 RxData[5][Size];
/*********************************************************************
* @fn IIC_Init
*
* @brief Initializes the IIC peripheral.
*
* @return none
*/
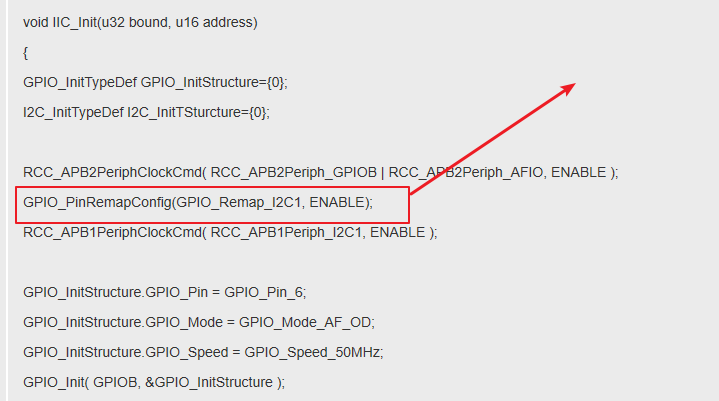
void IIC_Init(u32 bound, u16 address)
{
GPIO_InitTypeDef GPIO_InitStructure={0};
I2C_InitTypeDef I2C_InitTSturcture={0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE );
GPIO_PinRemapConfig(GPIO_Remap_I2C1, ENABLE);
RCC_APB1PeriphClockCmd( RCC_APB1Periph_I2C1, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_InitStructure );
I2C_InitTSturcture.I2C_ClockSpeed = bound;
I2C_InitTSturcture.I2C_Mode = I2C_Mode_I2C;
I2C_InitTSturcture.I2C_DutyCycle = I2C_DutyCycle_16_9;
I2C_InitTSturcture.I2C_OwnAddress1 = address;
I2C_InitTSturcture.I2C_Ack = I2C_Ack_Enable;
I2C_InitTSturcture.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_Init( I2C1, &I2C_InitTSturcture );
I2C_Cmd( I2C1, ENABLE );
#if (I2C_MODE == HOST_MODE)
I2C_AcknowledgeConfig( I2C1, ENABLE );
#endif
}
/*********************************************************************
* @fn main
*
* @brief Main program.
*
* @return none
*/
int main(void)
{
u8 i = 0;
u8 j = 0;
u8 p = 0;
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init( 115200 );
printf( "SystemClk:%d\r\n", SystemCoreClock );
printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() );
#if (I2C_MODE == HOST_MODE)
printf("IIC Host mode\r\n");
IIC_Init( 80000, TxAdderss);
for( j =0; j < 5; j++)
{
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
printf("I2C_GetFlagStatus\r\n");
I2C_GenerateSTART( I2C1, ENABLE );
printf("I2C_GenerateSTART\r\n");
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
printf("I2C_EVENT_MASTER_MODE_SELECT\r\n");
I2C_Send7bitAddress( I2C1, 0x02, I2C_Direction_Transmitter );
printf("I2C_Send7bitAddress\r\n");
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) );
printf("I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED\r\n");
for( i=0; i< 6;i++ )
{
if( I2C_GetFlagStatus( I2C1, I2C_FLAG_TXE ) != RESET )
{
Delay_Ms(100);
I2C_SendData( I2C1, TxData[i] );
}
}
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
I2C_GenerateSTOP( I2C1, ENABLE );
Delay_Ms(1000);
}
#elif (I2C_MODE == SLAVE_MODE)
printf("IIC Slave mode\r\n");
IIC_Init( 80000, RXAdderss);
for( p =0; p < 5; p++)
{
i = 0;
while( !I2C_CheckEvent( I2C1, I2C_EVENT_SLAVE_RECEIVER_ADDRESS_MATCHED ) );
while( i < 6 )
{
if( I2C_GetFlagStatus( I2C1, I2C_FLAG_RXNE ) != RESET )
{
RxData[p][i] = I2C_ReceiveData( I2C1 );
i++;
}
}
I2C1->CTLR1 &= I2C1->CTLR1;
}
printf( "RxData:\r\n" );
for(p=0; p<5; p++)
{
for( i = 0; i < 6; i++ )
{
printf( "%02x ", RxData[p][i] );
}
printf( "\r\n ");
}
#endif
while(1);
}