#include "usart.h"
#include
#include
#include
void Usart1_Init(unsigned int baud)
{
GPIO_InitTypeDef gpio_initstruct;
USART_InitTypeDef usart_initstruct;
NVIC_InitTypeDef nvic_initstruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//PA9 TXD
gpio_initstruct.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_initstruct.GPIO_Pin = GPIO_Pin_9;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpio_initstruct);
//PA10 RXD
gpio_initstruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_initstruct.GPIO_Pin = GPIO_Pin_10;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpio_initstruct);
usart_initstruct.USART_BaudRate = baud;
usart_initstruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
usart_initstruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //接收和发送
usart_initstruct.USART_Parity = USART_Parity_No; //无校验
usart_initstruct.USART_StopBits = USART_StopBits_1; //1位停止位
usart_initstruct.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_Init(USART1, &usart_initstruct);
USART_Cmd(USART1, ENABLE); //使能串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断
nvic_initstruct.NVIC_IRQChannel = USART1_IRQn;
nvic_initstruct.NVIC_IRQChannelCmd = ENABLE;
nvic_initstruct.NVIC_IRQChannelPreemptionPriority = 0;
nvic_initstruct.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&nvic_initstruct);
}
void Usart2_Init(unsigned int baud)
{
GPIO_InitTypeDef gpio_initstruct;
USART_InitTypeDef usart_initstruct;
NVIC_InitTypeDef nvic_initstruct;
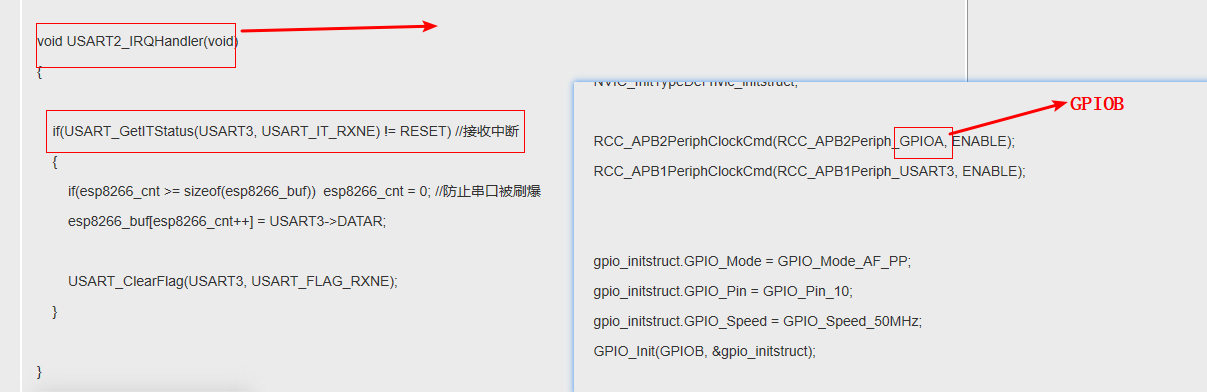
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
gpio_initstruct.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_initstruct.GPIO_Pin = GPIO_Pin_10;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio_initstruct);
gpio_initstruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_initstruct.GPIO_Pin = GPIO_Pin_11;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio_initstruct);
usart_initstruct.USART_BaudRate = baud;
usart_initstruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
usart_initstruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //接收和发送
usart_initstruct.USART_Parity = USART_Parity_No; //无校验
usart_initstruct.USART_StopBits = USART_StopBits_1; //1位停止位
usart_initstruct.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_Init(USART3, &usart_initstruct);
USART_Cmd(USART3, ENABLE); //使能串口
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //使能接收中断
nvic_initstruct.NVIC_IRQChannel = USART3_IRQn;
nvic_initstruct.NVIC_IRQChannelCmd = ENABLE;
nvic_initstruct.NVIC_IRQChannelPreemptionPriority = 0;
nvic_initstruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&nvic_initstruct);
}
void Usart_SendString(USART_TypeDef *USARTx, unsigned char *str, unsigned short len)
{
unsigned short count = 0;
for(; count < len; count++)
{
USART_SendData(USARTx, *str++); //发送数据
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET); //等待发送完成
}
}
void UsartPrintf(USART_TypeDef *USARTx, char *fmt,...)
{
unsigned char UsartPrintfBuf[296];
va_list ap;
unsigned char *pStr = UsartPrintfBuf;
va_start(ap, fmt);
vsnprintf((char *)UsartPrintfBuf, sizeof(UsartPrintfBuf), fmt, ap); //格式化
va_end(ap);
while(*pStr != 0)
{
USART_SendData(USARTx, *pStr++);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET);
}
}
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
USART_ClearFlag(USART1, USART_FLAG_RXNE);
}
}
//这是串口初始化,下面是esp8266的代码
#include "debug.h"
#include "esp8266.h"
#include "usart.h"
#include
#include
#define ESP8266_WIFI_INFO "AT+CWJAP=\"IQOOneo5\",\"12345678\"\r\n"
unsigned char esp8266_buf[512];
unsigned short esp8266_cnt = 0, esp8266_cntPre = 0;
void ESP8266_Clear(void)
{
memset(esp8266_buf, 0, sizeof(esp8266_buf));
esp8266_cnt = 0;
}
_Bool ESP8266_WaitRecive(void)
{
if(esp8266_cnt == 0) //如果接收计数为0 则说明没有处于接收数据中,所以直接跳出,结束函数
return REV_WAIT;
if(esp8266_cnt == esp8266_cntPre) //如果上一次的值和这次相同,则说明接收完毕
{
esp8266_cnt = 0; //清0接收计数
return REV_OK; //返回接收完成标志
}
esp8266_cntPre = esp8266_cnt; //置为相同
return REV_WAIT; //返回接收未完成标志
}
_Bool ESP8266_SendCmd(char *cmd, char *res)
{
unsigned char timeOut = 200;
Usart_SendString(USART3, (unsigned char *)cmd, strlen((const char *)cmd));
while(timeOut--)
{
if(ESP8266_WaitRecive() == REV_OK) //如果收到数据
{
UsartPrintf(USART_DEBUG, " Hardware init OK\r\n");
if(strstr((const char *)esp8266_buf, res) != NULL) //如果检索到关键词
{
ESP8266_Clear(); //清空缓存
return 0;
}
}
Delay_Ms(10);
}
return 1;
}
void ESP8266_SendData(unsigned char *data, unsigned short len)
{
char cmdBuf[32];
ESP8266_Clear(); //清空接收缓存
sprintf(cmdBuf, "AT+CIPSEND=%d\r\n", len); //发送命令
if(!ESP8266_SendCmd(cmdBuf, ">")) //收到‘>’时可以发送数据
{
Usart_SendString(USART3, data, len); //发送设备连接请求数据
}
}
unsigned char *ESP8266_GetIPD(unsigned short timeOut)
{
char *ptrIPD = NULL;
do
{
if(ESP8266_WaitRecive() == REV_OK) //如果接收完成
{
ptrIPD = strstr((char *)esp8266_buf, "IPD,"); //搜索“IPD”头
if(ptrIPD == NULL) //如果没找到,可能是IPD头的延迟,还是需要等待一会,但不会超过设定的时间
{
//UsartPrintf(USART_DEBUG, "\"IPD\" not found\r\n");
}
else
{
ptrIPD = strchr(ptrIPD, ':'); //找到':'
if(ptrIPD != NULL)
{
ptrIPD++;
return (unsigned char *)(ptrIPD);
}
else
return NULL;
}
}
Delay_Ms(10); //延时等待
} while(timeOut--);
return NULL; //超时还未找到,返回空指针
}
void ESP8266_Init(void)
{
ESP8266_Clear();
UsartPrintf(USART_DEBUG, "1. AT\r\n");
while(ESP8266_SendCmd("AT\r\n", "OK"))
Delay_Ms(500);
UsartPrintf(USART_DEBUG, "2. CWMODE\r\n");
while(ESP8266_SendCmd("AT+CWMODE=1\r\n", "OK"))
Delay_Ms(500);
UsartPrintf(USART_DEBUG, "3. AT+CWDHCP\r\n");
while(ESP8266_SendCmd("AT+CWDHCP=1,1\r\n", "OK"))
Delay_Ms(500);
UsartPrintf(USART_DEBUG, "4. CWJAP\r\n");
while(ESP8266_SendCmd(ESP8266_WIFI_INFO, "GOT IP"))
Delay_Ms(500);
UsartPrintf(USART_DEBUG, "5. ESP8266 Init OK\r\n");
}
void USART2_IRQHandler(void)
{
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //接收中断
{
if(esp8266_cnt >= sizeof(esp8266_buf)) esp8266_cnt = 0; //防止串口被刷爆
esp8266_buf[esp8266_cnt++] = USART3->DATAR;
USART_ClearFlag(USART3, USART_FLAG_RXNE);
}
}
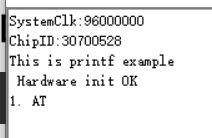 卡到连接第一步。
卡到连接第一步。