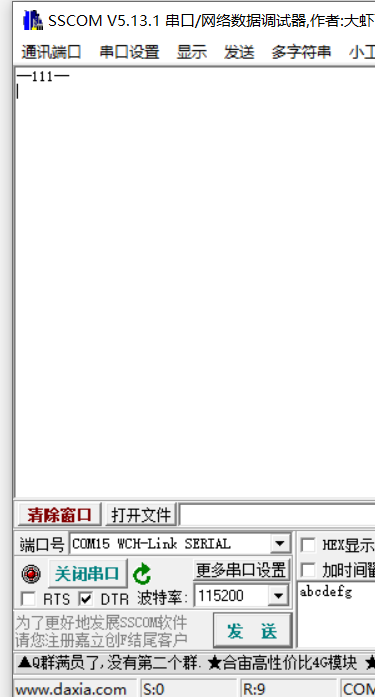
定时器中断配置完,中断里的打印没有执行,主程序尝试打印也没有打印出现
#include "debug.h"
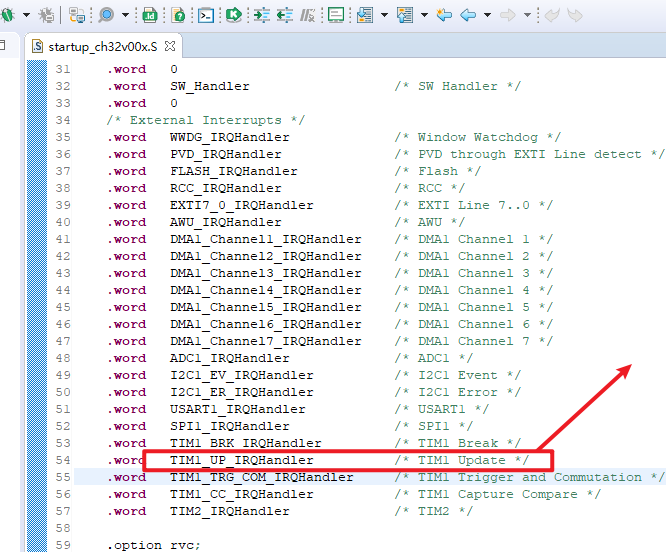
void TIM1_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
void TIM1_Int_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //使能TIM1时钟
TIM_TimeBaseStructure.TIM_Period = arr; //指定下次更新事件时要加载到活动自动重新加载寄存器中的周期值。
TIM_TimeBaseStructure.TIM_Prescaler =psc; //指定用于划分TIM时钟的预分频器值。
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频因子
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM计数模式,向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE ); //使能TIM1中断,允许更新中断
// TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
// TIM_ClearFlag(TIM1, TIM_FLAG_Update); //清除更新标志位
//初始化TIM NVIC,设置中断优先级分组
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //设置抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //设置响应优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能通道1中断
NVIC_Init(&NVIC_InitStructure); //初始化NVIC
TIM_Cmd(TIM1, ENABLE); //TIM1使能
}
u8 i=0;
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
SystemCoreClockUpdate();
Delay_Init();
#if (SDI_PRINT == SDI_PR_OPEN)
SDI_Printf_Enable();
#else
USART_Printf_Init(115200);
#endif
printf("--111--\r\n");
TIM1_Int_Init(9,4799); //1ms
while(1)
{
// GPIO_WriteBit(GPIOC, GPIO_Pin_4, (i == 0) ? (i = Bit_SET) : (i = Bit_RESET));
// printf("--00--\r\n");
// Delay_Ms(1);
}
}
void TIM1_IRQHandler(void) //1ms
{
if(TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查TIM2中断是否发生。
{
TIM_ClearITPendingBit(TIM1,TIM_IT_Update); //清除TIM2的中断挂起位。
printf("--00--\r\n");
GPIO_WriteBit(GPIOC, GPIO_Pin_4, (i == 0) ? (i = Bit_SET) : (i = Bit_RESET));
}
}