我在Peripheral_Init(),下面新加了一个SensorTask_Init()用来开启一个新的TMOS。这个TMOS用来获取传感器的数据,然后通过tmos_msg_send()。发送给蓝牙的任务,并最终通过Notify发送出去。但是实际使用却发现不太可行。
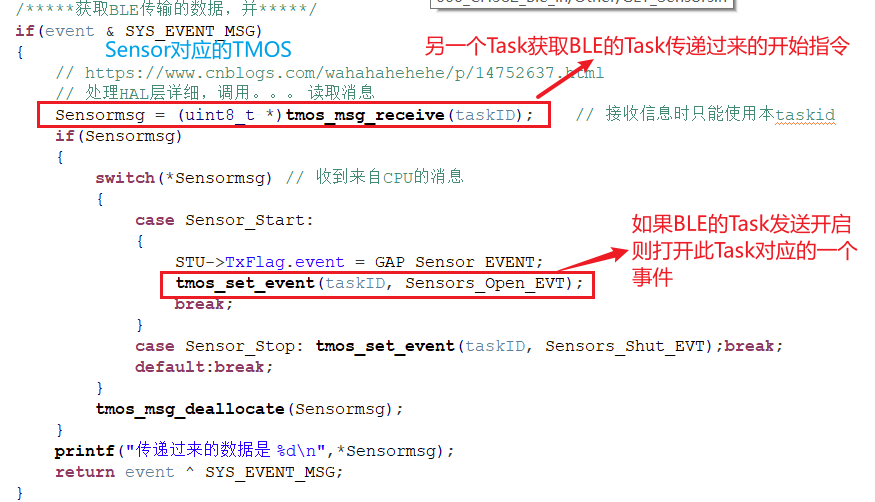
如下图所示的是Sensor对应的开启的一个TMOS回调函数内容:


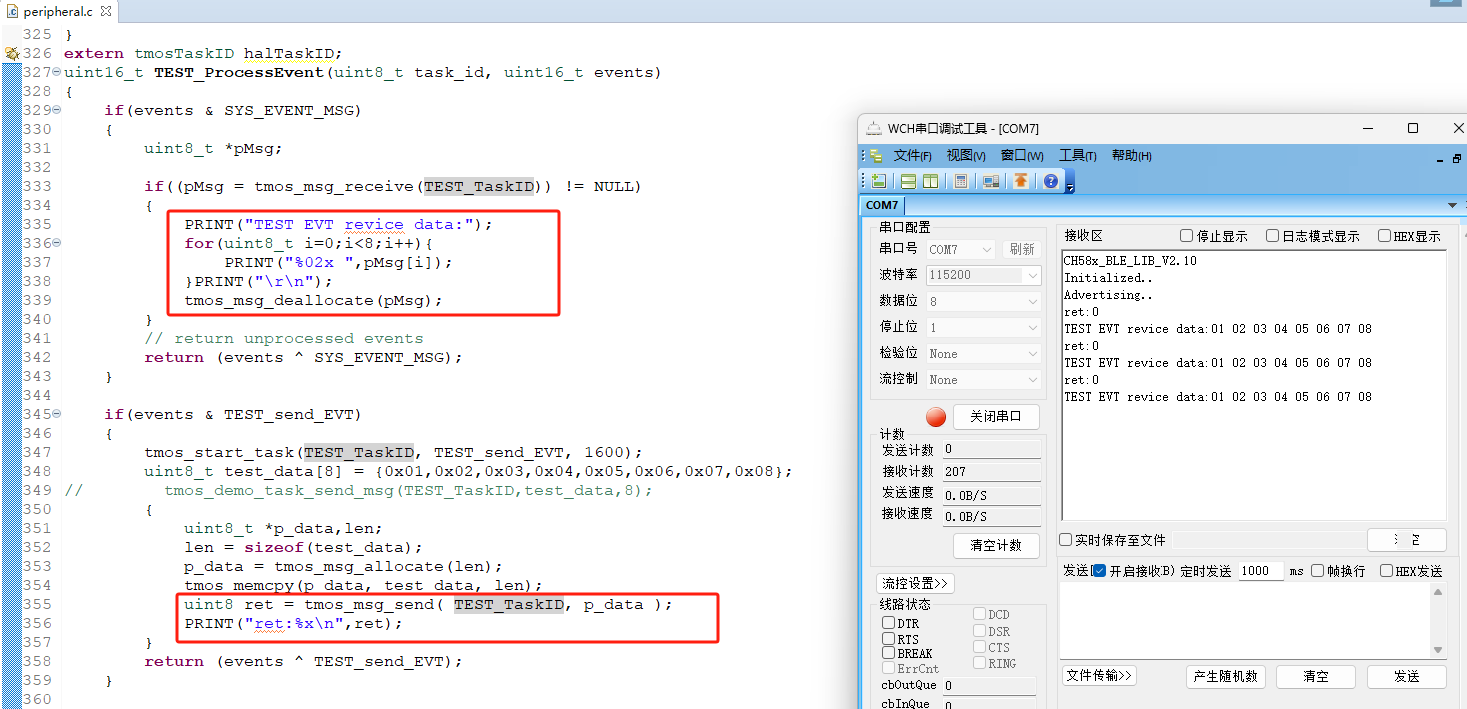
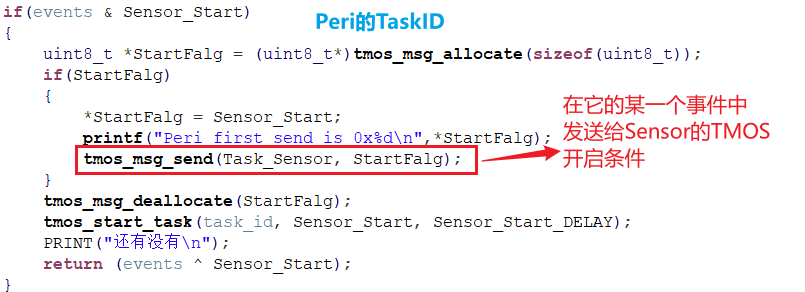
接下来是Peripheral对应的TMOS接收函数内容
最后发现,只要Peripheral通过TMOS往Sensor的TMOS发数据,等待一会BLE就会断开连接。
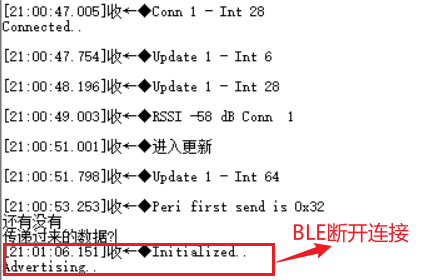
请问这是为什么?是不是不可以这样同时使用两个TMOS。不然BLE就会超时断开连接。
热门产品 :
CH32L103: 32位PDUSB低功耗单片机