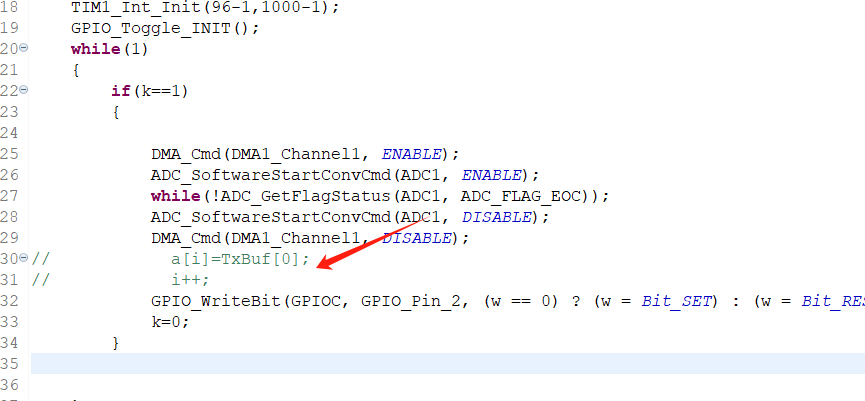
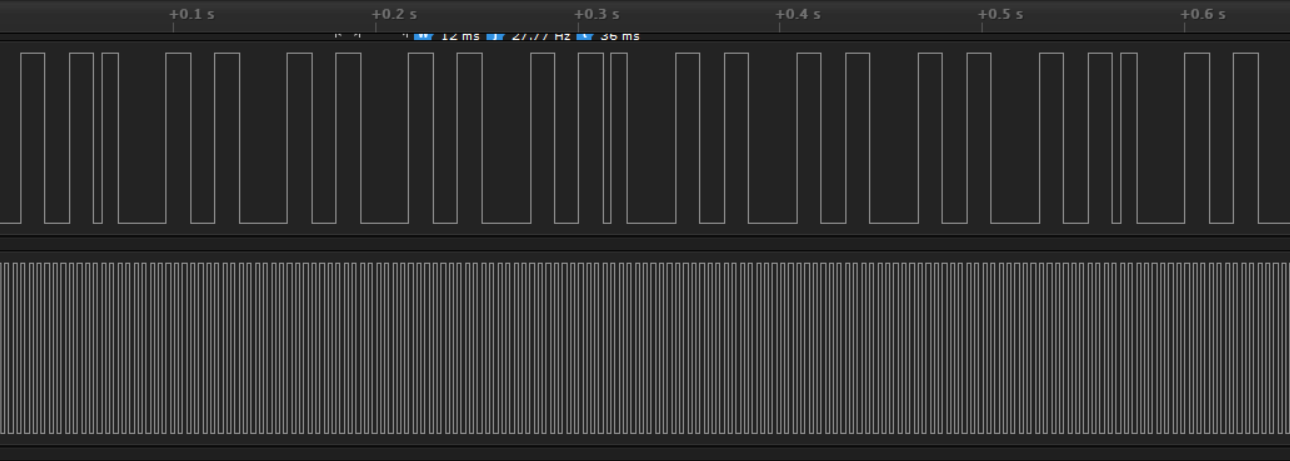
这个程序是要求每隔2ms采集一次三个通道的值,思路是在定时中断中设置标志位,while中执行adc采集,为判断
是否正常进入中断和采集,分别在中断和主程序ad后设置端口数出使用示波器查看波形,发现一个有意思的问题,在主程序中我将采集到的第一通道值依次赋给一数组a,发现波形很好,但如果我删掉此,却发现主程序执行就不正常了,按道理我删掉应该是节省了时间,程序如下(我没有删掉赋值a数组)
//定时器产生一次中断时间计算方式如下:
//T=(arr+1)*(psc+1)/Tpclk
//定时器计数一次的时间为:
//t=(psc+1)/Tpclk
//(1/1M)Hz=1us (1/1K)Hz=1ms
#include "debug.h"
void TIM1_UP_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
volatile u16 TxBuf[3];//ad获取存储
volatile u16 a[400];//ad获取存储
volatile u8 i=0;
volatile u8 c=0;
volatile u8 k=0;
volatile u8 w=0;
void ADC_Function_Init(void)
{
ADC_InitTypeDef ADC_InitStructure = {0};
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOD, &GPIO_InitStructure);
ADC_DeInit(ADC1);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = ENABLE;//多通道需要使能,扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;//连续转换
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;//没有外部触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 3;//转换三个通道
ADC_Init(ADC1, &ADC_InitStructure);
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 1, ADC_SampleTime_241Cycles);
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 2, ADC_SampleTime_241Cycles);
ADC_RegularChannelConfig(ADC1, ADC_Channel_4, 3, ADC_SampleTime_241Cycles);
ADC_Calibration_Vol(ADC1, ADC_CALVOL_50PERCENT);
ADC_DMACmd(ADC1, ENABLE);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
u16 Get_ADC_Val(u8 ch)
{
u16 val;
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_241Cycles);
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC));
val = ADC_GetConversionValue(ADC1);
return val;
}
void DMA_Tx_Init(DMA_Channel_TypeDef *DMA_CHx, u32 ppadr, u32 memadr, u16 bufsize)
{
DMA_InitTypeDef DMA_InitStructure = {0};
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
DMA_DeInit(DMA_CHx);
DMA_InitStructure.DMA_PeripheralBaseAddr = ppadr;
DMA_InitStructure.DMA_MemoryBaseAddr = memadr;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = bufsize;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA_CHx, &DMA_InitStructure);
}
void TIM1_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure={0};
NVIC_InitTypeDef NVIC_InitStructure={0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //使能TIM1时钟
TIM_TimeBaseStructure.TIM_Period = arr; //指定下次更新事件时要加载到活动自动重新加载寄存器中的周期值。
TIM_TimeBaseStructure.TIM_Prescaler =psc; //指定用于划分TIM时钟的预分频器值。
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频因子
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//TIM计数模式,向上计数模式
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
//初始化TIM NVIC,设置中断优先级分组
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //设置抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //设置响应优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能通道1中断
NVIC_Init(&NVIC_InitStructure); //初始化NVIC
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE ); //使能TIM1中断,允许更新中断
TIM_Cmd(TIM1, ENABLE); //TIM1使能
}
void GPIO_Toggle_INIT(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
int main(void)
{
SystemCoreClockUpdate();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
ADC_Function_Init();
DMA_Tx_Init(DMA1_Channel1, (u32)&ADC1->RDATAR, (u32)TxBuf,3);
TIM1_Int_Init(96-1,1000-1);
GPIO_Toggle_INIT();
while(1)
{
if(k==1)
{
DMA_Cmd(DMA1_Channel1, ENABLE);
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC));
ADC_SoftwareStartConvCmd(ADC1, DISABLE);
DMA_Cmd(DMA1_Channel1, DISABLE);
a[i]=TxBuf[0];
i++;
GPIO_WriteBit(GPIOC, GPIO_Pin_2, (w == 0) ? (w = Bit_SET) : (w = Bit_RESET));
k=0;
}
}
}
void TIM1_UP_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查TIM1中断是否发生。
{
k=1;
if(c==0)
{
GPIO_ResetBits(GPIOC, GPIO_Pin_1);
c++;
}
else
{
GPIO_SetBits(GPIOC, GPIO_Pin_1) ;
c=0;
}
TIM_ClearITPendingBit(TIM1,TIM_IT_Update); //清除TIM1的中断挂起位
}
}
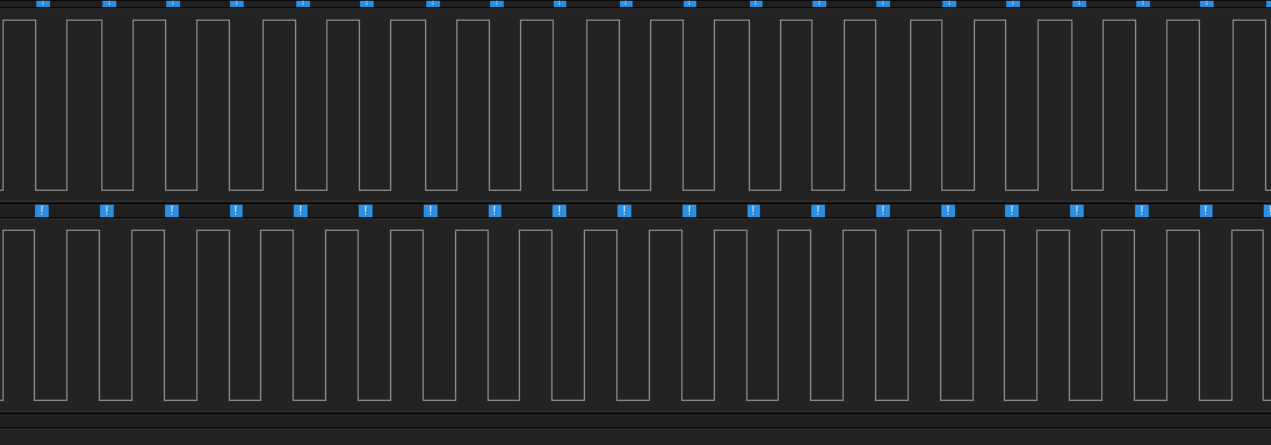
但如果我删掉主程序赋值语句,