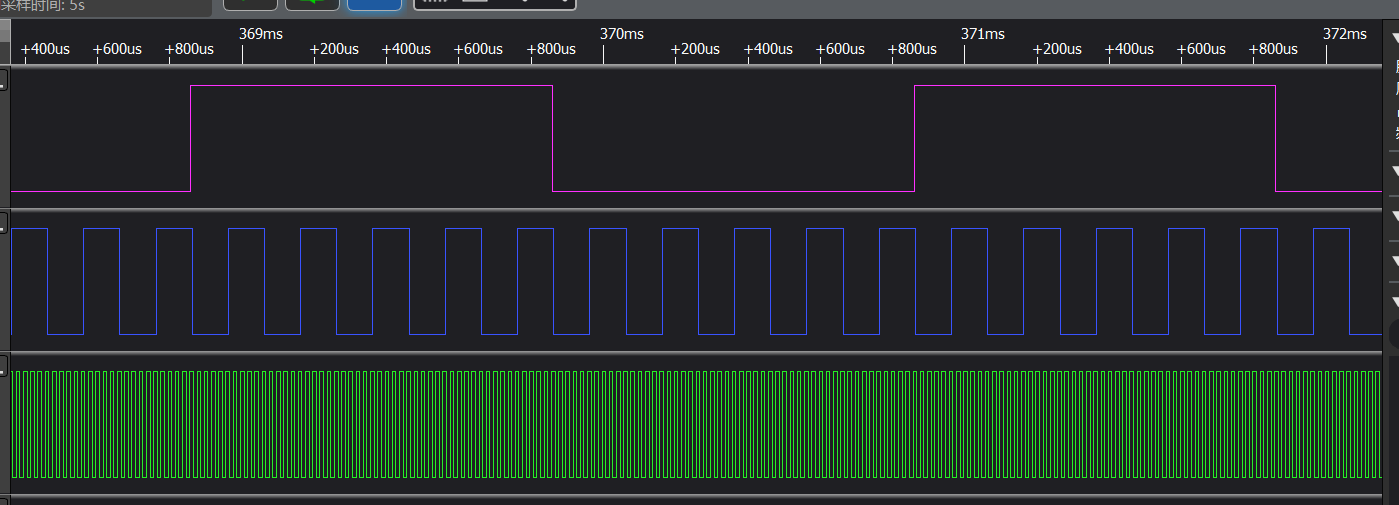
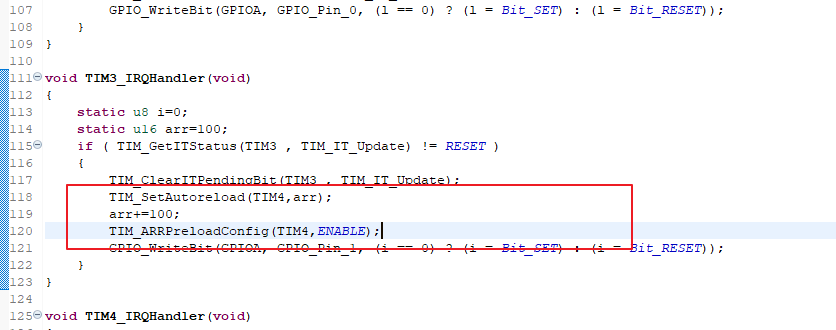
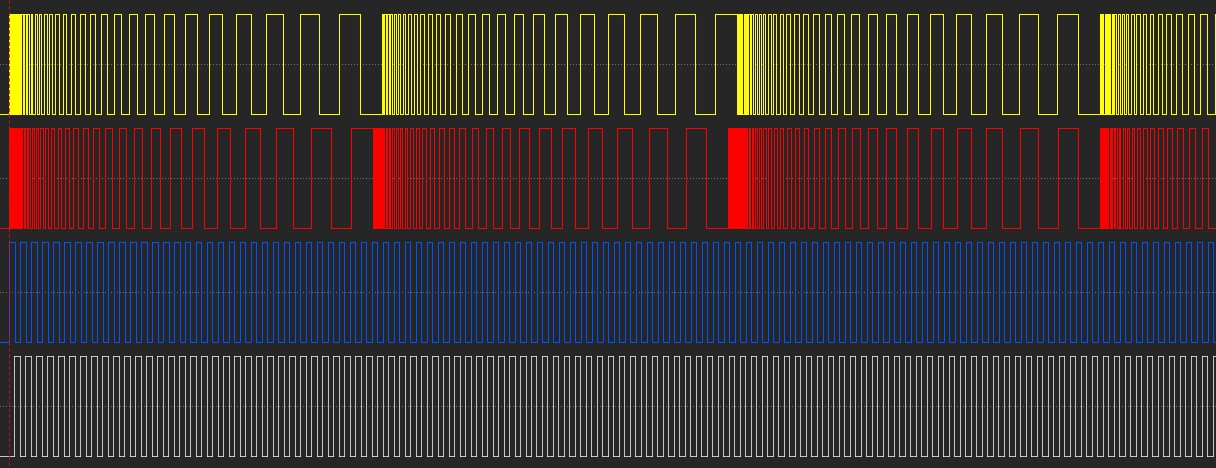
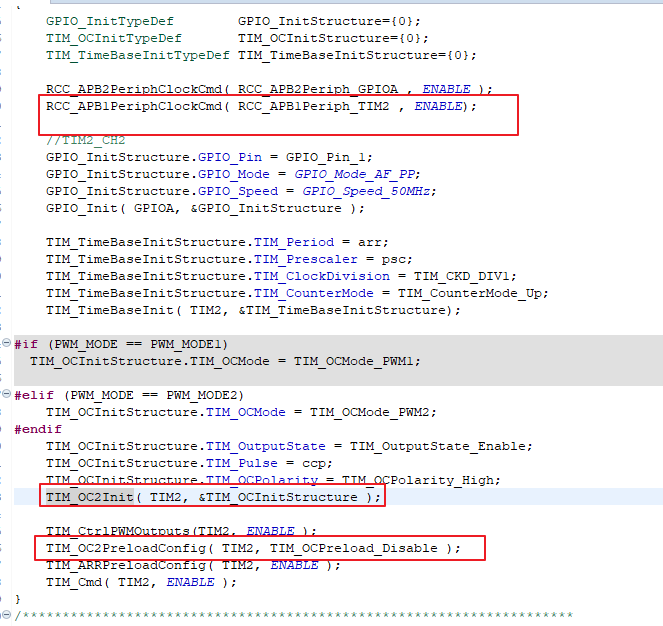
V203C8T6?TIM2模块按照正常初始化不能使用,?由于无法进入调试,?无法得知具体信息,?按照一样的代码,驱动TIM3,?TIM4都是能正常使用的。在TIM2定时器更新中断里翻转IO管脚,用逻辑分析仪是无法看到波形的。TIM3要和TIM4一起启动才能正常使用,单独使用TIM3也是不行。TIM4单独使用是可以的。附件是我的测试代码,使用的VSCode +?CMake编译, OpenOCD下载。编译目标是test_tim.elf
test_tim.c?代码如下:
/* ?*?@Author:?xiaosenluo?个人信息保护,已隐藏 ?*?@Date:?2023-02-06?00:32:59 ?*?@LastEditors:?xiaosenluo?个人信息保护,已隐藏 ?*?@LastEditTime:?2023-02-12?20:01:54 ?*?@FilePath:?\wch_ch32v203_TeensyStepC\User\Test\test_tim.c ?*?@Description:? ?*? ?*?Copyright?(c)?2023?by?${git_name_email},?All?Rights?Reserved.? ?*/ /**********************************?(C)?COPYRIGHT?******************************* ?*?File?Name??????????:?main.c ?*?Author?????????????:?WCH ?*?Version????????????:?V1.0.0 ?*?Date???????????????:?2021/06/06 ?*?Description????????:?Main?program?body. ?*?Copyright?(c)?2021?Nanjing?Qinheng?Microelectronics?Co.,?Ltd. ?*?SPDX-License-Identifier:?Apache-2.0 ?*******************************************************************************/ #include?"debug.h" #include?"IQmath_RV32.h" #include?"string.h" #include?"ch32v20x_it.h" /*?Global?define?*/ /*?Global?Variable?*/ /********************************************************************* ?*?@fn??????NMI_Handler ?* ?*?@brief???This?function?handles?NMI?exception. ?* ?*?@return??none ?*/ void?NMI_Handler(void) { } /********************************************************************* ?*?@fn??????HardFault_Handler ?* ?*?@brief???This?function?handles?Hard?Fault?exception. ?* ?*?@return??none ?*/ void?HardFault_Handler(void) { ??while?(1) ??{ ??} } /********************************************************************* ?*?@fn??????GPIO_Toggle_INIT ?* ?*?@brief???Initializes?GPIOA.0 ?* ?*?@return??none ?*/ void?GPIO_Toggle_INIT(void) { ????GPIO_InitTypeDef?GPIO_InitStructure?=?{0}; ????RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,?ENABLE); ????GPIO_InitStructure.GPIO_Pin?=?GPIO_Pin_0?|?GPIO_Pin_14?|?GPIO_Pin_12; ????GPIO_InitStructure.GPIO_Mode?=?GPIO_Mode_Out_PP; ????GPIO_InitStructure.GPIO_Speed?=?GPIO_Speed_50MHz; ????GPIO_Init(GPIOA,?&GPIO_InitStructure); ????RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,?ENABLE); ????GPIO_InitStructure.GPIO_Pin?=?GPIO_Pin_7?|?GPIO_Pin_5?|?GPIO_Pin_3?|?GPIO_Pin_1?|?GPIO_Pin_10?|?GPIO_Pin_12; ????GPIO_InitStructure.GPIO_Mode?=?GPIO_Mode_Out_PP; ????GPIO_InitStructure.GPIO_Speed?=?GPIO_Speed_50MHz; ????GPIO_Init(GPIOB,?&GPIO_InitStructure); } void?GPIO_Toggle(GPIO_TypeDef?*GPIOx,?uint16_t?Pinx){ ????uint32_t?state?=?GPIOx->OUTDR; ????if(state?&?Pinx){???///?high ????????GPIOx->BCR?=?Pinx; ????}else{ ????????GPIOx->BSHR?=?Pinx; ????} } void?TIM2_IRQHandler(void){ ????if(TIM_GetFlagStatus(TIM2,?TIM_FLAG_Update)?==?SET){ ????????TIM_ClearFlag(TIM2,?TIM_FLAG_Update); ????????GPIO_Toggle(GPIOB,?GPIO_Pin_1); ????} } void?TIM3_IRQHandler(void){ ????if(TIM_GetFlagStatus(TIM3,?TIM_FLAG_Update)?==?SET){ ????????TIM_ClearFlag(TIM3,?TIM_FLAG_Update); ????????GPIO_Toggle(GPIOB,?GPIO_Pin_10); ????} } void?TIM4_IRQHandler(void){ ????if(TIM_GetFlagStatus(TIM4,?TIM_FLAG_Update)?==?SET){ ????????TIM_ClearFlag(TIM4,?TIM_FLAG_Update); ????????GPIO_Toggle(GPIOB,?GPIO_Pin_3); ????} ????if(TIM_GetFlagStatus(TIM4,?TIM_FLAG_CC1)?==?SET){ ????????TIM_ClearFlag(TIM4,?TIM_FLAG_CC1); ????????GPIO_Toggle(GPIOB,?GPIO_Pin_12); ????} } #define?TIM_CLK_PSC??????36000000 #define?STEP_TIM_CLK?????9000000 #define?ACC_TIM_CLK??????1000000 #define?TIMERFIELD_START(tim)??do{?\ ????TIM_ARRPreloadConfig(tim,?ENABLE);?\ ????TIM_ClearFlag(tim,?TIM_FLAG_Update);?\ ????TIM_ITConfig(tim,?TIM_IT_Update,?ENABLE);?\ ????TIM_Cmd(tim,?ENABLE);?\ }while(0) #define?TIMERFIELD_STOP(tim)??do{?\ ????TIM_Cmd(tim,?DISABLE);?\ ????TIM_ClearFlag(tim,?TIM_FLAG_Update);?\ ????TIM_ITConfig(tim,?TIM_IT_Update,?DISABLE);?\ }while(0) /********************************************************************* ?*?@fn??????main ?* ?*?@brief???Main?program. ?* ?*?@return??none ?*/ int?main(void) { ????SystemCoreClockUpdate(); ????NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); ????Delay_Init(); ????USART_Printf_Init(115200); ????GPIO_Toggle_INIT(); ????printf("SystemClk:%ld\r\n",?SystemCoreClock); ????TIM_TimeBaseInitTypeDef?TIM_TimeBaseInitStructure?=?{?0?}; ????TIM_OCInitTypeDef?TIM_OCInitStructure={?0?}; ????RCC_ClocksTypeDef?RCC_Clocks?=?{?0?}; ??? ????uint32_t?tim_clk?=?144000000,?priod?=?144,?presc?=?1; ????RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,?ENABLE); ????RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,?ENABLE); ????RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,?ENABLE); ??? ????RCC_GetClocksFreq(&RCC_Clocks); ????tim_clk?=?RCC_Clocks.PCLK1_Frequency; ????if(!(RCC->CFGR0?&?RCC_PPRE1_DIV1)){ ????????tim_clk?<<=?1; ????} ????tim_clk?/=?4; ????presc?=?(tim_clk?/?STEP_TIM_CLK)?-?1; ????priod?=?27;???///?默认间隔?3US ????TIM_TimeBaseInitStructure.TIM_ClockDivision?=?TIM_CKD_DIV4; ????TIM_TimeBaseInitStructure.TIM_CounterMode?=?TIM_CounterMode_Up; ????TIM_TimeBaseInitStructure.TIM_Period?=?1000; ????TIM_TimeBaseInitStructure.TIM_Prescaler?=?16; ????TIM_TimeBaseInit(TIM2,?&TIM_TimeBaseInitStructure); ????TIM_ARRPreloadConfig(TIM2,?ENABLE); ????TIM_Cmd(TIM2,?DISABLE?); ????TIM_ClearFlag(TIM2,?TIM_FLAG_Update); ????///?计数频率?9MHz,?用于输出?Step?脉冲 ????TIM_TimeBaseInitStructure.TIM_Period?=?1800; ????TIM_TimeBaseInit(TIM4,?&TIM_TimeBaseInitStructure); ????TIM_ARRPreloadConfig(TIM4,?ENABLE); ????TIM_Cmd(TIM4,?DISABLE?); ????TIM_ClearFlag(TIM4,?TIM_FLAG_Update); ????///?用于设置加速间隔 ????//?TIM_TimeBaseInitStructure.TIM_Prescaler?=?16; ????TIM_TimeBaseInitStructure.TIM_Period?=?800; ????TIM_TimeBaseInit(TIM3,?&TIM_TimeBaseInitStructure); ????TIM_ARRPreloadConfig(TIM3,?ENABLE); ????TIM_Cmd(TIM3,?DISABLE?); ????TIM_ClearFlag(TIM3,?TIM_FLAG_Update); ????//?TIM_OCInitStructure.TIM_OCMode?=?TIM_OCMode_Timing; ????//?TIM_OCInitStructure.TIM_OutputState?=?TIM_OutputState_Disable; ????//?TIM_OCInitStructure.TIM_Pulse?=?100;???///?默认宽度?2US ????//?TIM_OCInitStructure.TIM_OCPolarity?=?TIM_OCPolarity_Low; ????//?TIM_OC1Init(?TIM4,?&TIM_OCInitStructure?); ????//?TIM_OC1PreloadConfig(TIM4,?TIM_OCPreload_Disable); ????//?TIM_ClearFlag(TIM4,?TIM_FLAG_CC1); ????//?TIM_ITConfig(TIM4,?TIM_IT_CC1,?ENABLE); ??? ????NVIC_SetPriority(TIM2_IRQn,?2); ????NVIC_SetPriority(TIM3_IRQn,?2); ????NVIC_SetPriority(TIM4_IRQn,?2); ??? ????NVIC_EnableIRQ(TIM2_IRQn); ????NVIC_EnableIRQ(TIM3_IRQn); ????NVIC_EnableIRQ(TIM4_IRQn); ??? ????TIMERFIELD_START(TIM2); ????//?TIMERFIELD_START(TIM3); ????TIMERFIELD_START(TIM4); ????while(1) ????{ ????????Delay_Ms(250); ????????GPIO_Toggle(GPIOA,?GPIO_Pin_0); ????} }
CMakeLists.txt内容如下:
cmake_minimum_required(VERSION?3.15)
set(CMAKE_SYSTEM_NAME?Generic)
set(CMAKE_SYSTEM_PROCESSOR?riscv)
set(CMAKE_C_COMPILER?riscv-none-embed-gcc)
set(CMAKE_CXX_COMPILER?riscv-none-embed-g++)
set(CMAKE_ASM_COMPILER?riscv-none-embed-gcc)
set(CMAKE_LINKER?riscv-none-embed-ld)
set(CMAKE_AR?riscv-none-embed-ar)
set(CMAKE_OBJCOPY?riscv-none-embed-objcopy)
set(CMAKE_OBJDUMP?riscv-none-embed-objdump)
set(SIZE?riscv-none-embed-size)
set(GDB?riscv-none-embed-gdb)
set(CMAKE_TRY_COMPILE_TARGET_TYPE?STATIC_LIBRARY)
#?set(CMAKE_EXECUTABLE_SUFFIX_C?".elf")
set(CMAKE_C_STANDARD?11)
set(CMAKE_CXX_STANDARD?17)
#?设置编译目标变量
#?set(PRJ_TARGET?"wch_template")
#?设置项目名称
project(wch_ch32v203_TeensyStepC?LANGUAGES?C?CXX?ASM)
#?设置项目根目录路径变量
#?set(PRJ_DIR?"C:/UserTemp/wch_cmake_template")
#?add_executable(${PRJ_TARGET})
#?set_target_properties(${PRJ_TARGET}?PROPERTIES?LINKER_LANGUAGE?C)
#?target_sources(${PRJ_TARGET}?PUBLIC
#?????????"${PRJ_DIR}/User/main.c")
#?MCU设置
add_compile_options(-march=rv32imac?-mabi=ilp32?-msmall-data-limit=8?-mno-save-restore)
#?优化设置
#?add_compile_options(-Os?-g3)
#?标准设置
#?add_compile_options(-std=gnu99)
#?编译设置
add_compile_options(
????????-Os
????????-Wall
????????-Wfatal-errors
????????-Wunused
????????-Wuninitialized
????????-fmessage-length=0
????????-ffunction-sections
????????-fdata-sections
????????-fsigned-char)
#?处理ASM文件
add_compile_options($)
if?("${CMAKE_BUILD_TYPE}"?STREQUAL?"Release")
????message(STATUS?"Maximum?optimization?for?speed")
????add_compile_options(-Ofast)
elseif?("${CMAKE_BUILD_TYPE}"?STREQUAL?"RelWithDebInfo")
????message(STATUS?"Maximum?optimization?for?speed,?debug?info?included")
????add_compile_options(-Ofast?-g)
elseif?("${CMAKE_BUILD_TYPE}"?STREQUAL?"MinSizeRel")
????message(STATUS?"Maximum?optimization?for?size")
????add_compile_options(-Os)
else?()
????message(STATUS?"Minimal?optimization,?debug?info?included")
????add_compile_options(-Og?-g)
endif?()
include_directories(
????????"C:/wch/tools/wch_riscv_gcc_8_2_0/riscv-none-embed/include"
????????"C:/wch/tools/wch_riscv_gcc_8_2_0/lib/gcc/riscv-none-embed/8.2.0/include"
????????"C:/wch/tools/wch_riscv_gcc_8_2_0/lib/gcc/riscv-none-embed/8.2.0/include-fixed"
????????"Peripheral/inc"
????????"Core"
????????"Debug"
)
file(GLOB_RECURSE?COMMENT_SOURCE_FILE
????????"Startup/startup_ch32v20x_D6.S"
????????"Core/core_riscv.c"
????????"Debug/debug.c"
????????"Peripheral/src/ch32v20x_adc.c"
????????"Peripheral/src/ch32v20x_bkp.c"
????????"Peripheral/src/ch32v20x_can.c"
????????"Peripheral/src/ch32v20x_crc.c"
????????"Peripheral/src/ch32v20x_dac.c"
????????"Peripheral/src/ch32v20x_dbgmcu.c"
????????"Peripheral/src/ch32v20x_dma.c"
????????"Peripheral/src/ch32v20x_exti.c"
????????"Peripheral/src/ch32v20x_flash.c"
????????"Peripheral/src/ch32v20x_gpio.c"
????????"Peripheral/src/ch32v20x_i2c.c"
????????"Peripheral/src/ch32v20x_iwdg.c"
????????"Peripheral/src/ch32v20x_misc.c"
????????"Peripheral/src/ch32v20x_opa.c"
????????"Peripheral/src/ch32v20x_pwr.c"
????????"Peripheral/src/ch32v20x_rcc.c"
????????"Peripheral/src/ch32v20x_rng.c"
????????"Peripheral/src/ch32v20x_rtc.c"
????????"Peripheral/src/ch32v20x_spi.c"
????????"Peripheral/src/ch32v20x_tim.c"
????????"Peripheral/src/ch32v20x_usart.c"
????????"Peripheral/src/ch32v20x_wwdg.c"
????????"User/uart_printf.c"
)
add_compile_definitions(PRINTF_ALIAS_STANDARD_FUNCTION_NAMES=1)
add_subdirectory(Components/printf)
link_libraries(printf)
link_directories("C:/wch/tools/wch_riscv_gcc_8_2_0/riscv-none-embed/lib/rv32imac/ilp32")
#?添加?IQmath
add_compile_definitions(MATH_TYPE=IQ_MATH?GLOBAL_Q=6)
#?include_directories(Components/IQmath_RV32)
link_libraries(IQmath_RV32)
link_libraries(m)
set(LINKER_SCRIPT?${CMAKE_SOURCE_DIR}/Ld/Link.ld)
#?链接设置
add_link_options(-march=rv32imac?-mabi=ilp32)
add_link_options(-ffunction-sections?-fdata-sections?-fmessage-length=0?-fstack-usage)
#add_link_options(-std=gnu11)
add_link_options(-Wall?-Wfatal-errors)
add_link_options(-Wl,-check-sections?-Wl,-fatal-warnings?-Wl,--gc-sections?-Wl,--print-memory-usage)
add_link_options(-T?${LINKER_SCRIPT})
add_link_options(-nostartfiles?-Xlinker?--gc-sections)
add_link_options("-Wl,-Map,${PROJECT_BINARY_DIR}/${PROJECT_NAME}.map"?-Wl,--cref)
add_link_options(--specs=nano.specs?--specs=nosys.specs)
add_link_options(-lm)
add_executable(${PROJECT_NAME}.elf?${COMMENT_SOURCE_FILE}?User/main.c)
if?("${CMAKE_BUILD_TYPE}"?STREQUAL?"Release")
????message(STATUS?"Maximum?optimization?for?speed")
????target_compile_options(${PROJECT_NAME}.elf?PRIVATE?-Ofast)
elseif?("${CMAKE_BUILD_TYPE}"?STREQUAL?"RelWithDebInfo")
????message(STATUS?"Maximum?optimization?for?speed,?debug?info?included")
????target_compile_options(${PROJECT_NAME}.elf?PRIVATE?-Og)
elseif?("${CMAKE_BUILD_TYPE}"?STREQUAL?"MinSizeRel")
????message(STATUS?"Maximum?optimization?for?size")
????target_compile_options(${PROJECT_NAME}.elf?PRIVATE?-Os)
else?()
????message(STATUS?"Minimal?optimization,?debug?info?included")
????target_compile_options(${PROJECT_NAME}.elf?PRIVATE?-Og?-g)
endif?()
target_include_directories(${PROJECT_NAME}.elf?PRIVATE?User)
target_sources(${PROJECT_NAME}.elf?PRIVATE?
????"User/ch32v20x_it.c"
????"User/system_ch32v20x.c"
????"User/tim.c"
)
target_include_directories(${PROJECT_NAME}.elf?PRIVATE?Components/TeensyStepC/src)
target_sources(${PROJECT_NAME}.elf?PRIVATE?
????"Components/TeensyStepC/src/Stepper.c"
????"Components/TeensyStepC/src/StepControlBase.c"
????"Components/TeensyStepC/src/RotateControlBase.c"
????"Components/TeensyStepC/src/MotorControlBase.c"
????"Components/TeensyStepC/src/ErrorHandler.c"
????"Components/TeensyStepC/src/accelerators/LinStepAccelerator.c"
????"Components/TeensyStepC/src/accelerators/LinRotAccelerator.c"
????"Components/TeensyStepC/src/accelerators/SinRotAccelerator.c"
????"Components/TeensyStepC/src/port/timer/wch/TimerField.c"
)
target_include_directories(${PROJECT_NAME}.elf?PRIVATE?Components/bget)
target_sources(${PROJECT_NAME}.elf?PRIVATE?
????"Components/bget/bget.c"
)
include(User/Test/test_tim.cmake)
set(HEX_FILE?${PROJECT_BINARY_DIR}/${PROJECT_NAME}.hex)
set(BIN_FILE?${PROJECT_BINARY_DIR}/${PROJECT_NAME}.bin)
set(LIST_FILE?${PROJECT_BINARY_DIR}/${PROJECT_NAME}.list)
add_custom_command(TARGET?${PROJECT_NAME}.elf?POST_BUILD
????????COMMAND?${SIZE}?--format=berkeley?$????????COMMAND?${CMAKE_OBJDUMP}?--all-headers?--demangle?--disassemble?$?>?${LIST_FILE}
????????COMMAND?${CMAKE_OBJCOPY}?-O?ihex?$?${HEX_FILE}
????????COMMAND?${CMAKE_OBJCOPY}?-O?binary?$?${BIN_FILE}
????????COMMENT?"Building?${HEX_FILE}
Building?${BIN_FILE}")
test_tim.cmake?内容如下:
add_executable(test_tim.elf?${COMMENT_SOURCE_FILE}?${COMMENT_SOURCE_FILE}?User/Test/test_tim.c)
target_include_directories(test_tim.elf?PRIVATE?User)
target_compile_options(test_tim.elf?PRIVATE?-Os)
target_sources(test_tim.elf?PRIVATE?
????"User/system_ch32v20x.c"
????"User/tim.c"
)
set(HEX_FILE?${PROJECT_BINARY_DIR}/test_tim.hex)
set(BIN_FILE?${PROJECT_BINARY_DIR}/test_tim.bin)
set(LIST_FILE?${PROJECT_BINARY_DIR}/test_tim.list)
add_custom_command(TARGET?test_tim.elf?POST_BUILD
????????COMMAND?${SIZE}?--format=berkeley?$????????COMMAND?${CMAKE_OBJDUMP}?--all-headers?--demangle?--disassemble?$?>?${LIST_FILE}
????????COMMAND?${CMAKE_OBJCOPY}?-O?ihex?$?${HEX_FILE}
????????COMMAND?${CMAKE_OBJCOPY}?-O?binary?$?${BIN_FILE}
????????COMMENT?"Building?${HEX_FILE}
Building?${BIN_FILE}")
麻烦看看是定时器Bug还是代码有问题,?麻烦给一个TIM2,3,4测试代码,?邮箱? 个人信息保护,已隐藏
热门产品 :
CH32V317: 互联型青稞RISC-V MCU